
DANH MỤC SẢN PHẨM



Động cơ bước giá rẻ
Mã SP :Động cơ bước giá rẻ
Thương hiệu:PFDE
Giá Liên Hệ
Động cơ bước là gì
Động cơ bước (stepper motor) là một loại động cơ điện hoạt động theo nguyên lý chia nhỏ vòng quay thành nhiều bước rời rạc.Mỗi khi được cấp một tín hiệu điện, rotor (phần quay) của động cơ sẽ quay một góc nhất định (gọi là bước), thay vì quay liên tục như các động cơ điện thông thường.
Liên hệ Hotline:0975666315
để được hỗ trợ tư vấn tốt nhất
-
Tên sản phẩm: Động cơ bước
-
Mã sản phẩm: Động cơ bước
-
Thương hiệu:PFDE
-
Thuộc dòng động cơ bước
-
Tình trạng: hàng mới.
-
Kho hàng:Liên hệ.
Đặc điểm chính của động cơ bước
-
Quay theo từng bước: Mỗi xung điện tương ứng với một bước quay cụ thể.
-
Không cần encoder: Có thể điều khiển vị trí chính xác mà không cần cảm biến phản hồi vị trí.
-
Dễ điều khiển: Phù hợp với vi điều khiển và mạch điều khiển số.
-
Mô-men xoắn lớn ở tốc độ thấp.
Các loại động cơ bước phổ biến:
1. Động cơ bước lưỡng cực (bipolar): Có 2 cuộn dây và cần mạch điều khiển đảo chiều dòng điện.
2. Động cơ bước đơn cực (unipolar): Dễ điều khiển hơn nhưng mô-men xoắn thấp hơn.
3. Động cơ bước biến từ (variable reluctance): Không có nam châm vĩnh cửu, ít dùng hơn.
Ứng dụng động cơ bước
-
Máy in 3D, CNC, robot, camera, hệ thống điều khiển vị trí,…
So sánh động cơ bước và động cơ servo
|
Tiêu chí |
Động cơ bước (Stepper Motor) |
Động cơ servo (Servo Motor) |
|
Nguyên lý hoạt động |
Quay từng bước theo tín hiệu xung đầu vào |
Quay liên tục, điều chỉnh vị trí bằng vòng hồi tiếp |
|
Cảm biến hồi tiếp |
Thường không có (open-loop) |
Có (closed-loop), dùng encoder để theo dõi vị trí |
|
Độ chính xác vị trí |
Cao (nếu không trượt bước) |
Rất cao, nhờ vòng điều khiển hồi tiếp |
|
Mô-men xoắn ở tốc độ thấp |
Mạnh |
Mạnh hơn, mượt hơn |
|
Mô-men xoắn ở tốc độ cao |
Giảm nhanh |
Duy trì tốt |
|
Tốc độ quay tối đa |
Trung bình |
Cao hơn |
|
Khả năng quá tải |
Kém |
Tốt, có thể chịu tải nặng hơn |
|
Giá thành |
Thường rẻ hơn |
Thường đắt hơn |
|
Ứng dụng |
CNC, máy in 3D, robot đơn giản |
Cánh tay robot, máy công nghiệp, điều khiển chính xác cao |
Tóm lại:
-
Động cơ bước phù hợp cho hệ thống điều khiển đơn giản, chi phí thấp, không yêu cầu phản hồi vị trí quá chính xác.
-
Servo motor phù hợp cho ứng dụng cần tốc độ cao, mô-men lớn, và điều khiển chính xác cao.
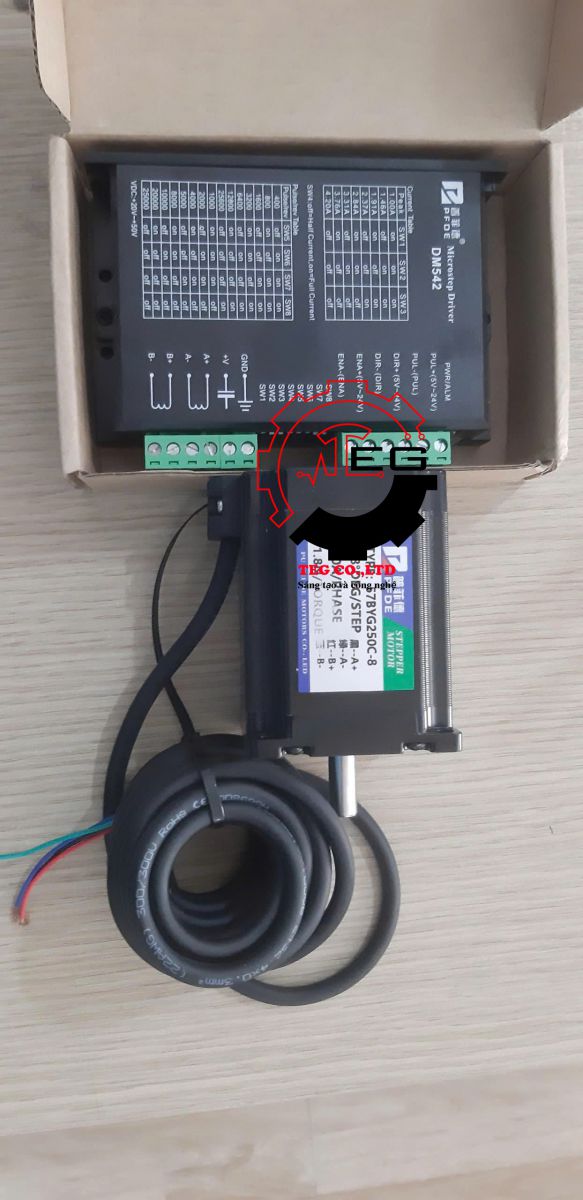
Một số hình ảnh động cơ bước



Nguyên lý hoạt động của động cơ bước
[Arduino] [ULN2003] [Động cơ bước]
D8 ----------------> IN1 \
D9 ----------------> IN2 >------------- C1 (cuộn dây)
D10 ----------------> IN3 >------------- C2
D11 ----------------> IN4 / ... (C3, C4)
|
|
OUT1-4 ----------------> Động cơ
|
GND -------------------- GND chung
|
VCC (5V) ----------------> Nguồn cấp cho động cơ
Giải thích nguyên lý hoạt động:
-
Arduino gửi các xung điều khiển qua các chân D8–D11.
-
ULN2003 đóng vai trò như bộ khuếch đại dòng, giúp cấp đủ dòng cho động cơ.
-
Mỗi xung được truyền sẽ làm động cơ quay một bước nhỏ (khoảng 5.625°/64 đối với 28BYJ-48).
-
Bạn có thể lập trình thứ tự bật/tắt cuộn dây để quay thuận/ngược hoặc điều chỉnh tốc độ.
SẢN PHẨM LIÊN QUAN










































